Fire and Gas Mapping Methods: Comparing Volumetric, Scenario-Based, and Risk-Based Approaches
An in-depth comparison of volumetric (geographic), scenario-based, and risk-based fire and gas mapping methods, highlighting their methodologies, advantages, and limitations for high-hazard industries.
Introduction
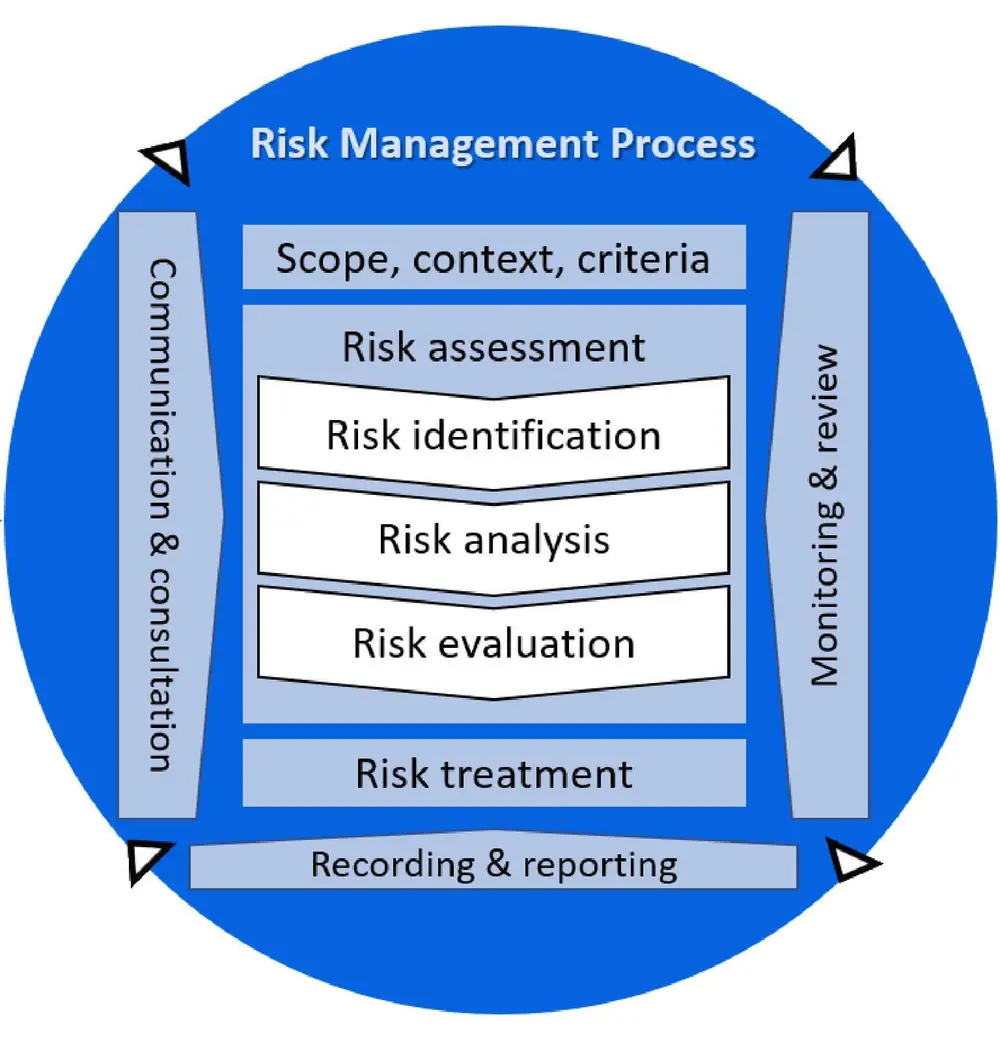
Fire and gas detection systems are essential components of safety management in high-hazard industries dealing with flammable and toxic materials in operations. Their purpose is to detect the presence of flames and flammable or toxic gases quickly and reliably, triggering alarms and activating mitigation systems to protect personnel, assets, and the environment.
The placement of detectors significantly influences the effectiveness of these systems, and international standards such as ISA TR84.00.07 and BS 60080 provide guidance for detector placement and coverage assessment. Three principal methodologies are available to design detector layouts: volumetric (geographic), scenario-based, and risk-based mapping. Each method varies in terms of complexity, required input data, flexibility, and alignment with performance-based safety goals.
This article provides a detailed comparison of these methodologies, correcting some common misconceptions, and examines the technical strengths and limitations with reference to flame, gas, and acoustic detection technologies.
Volumetric (Geographic) Mapping
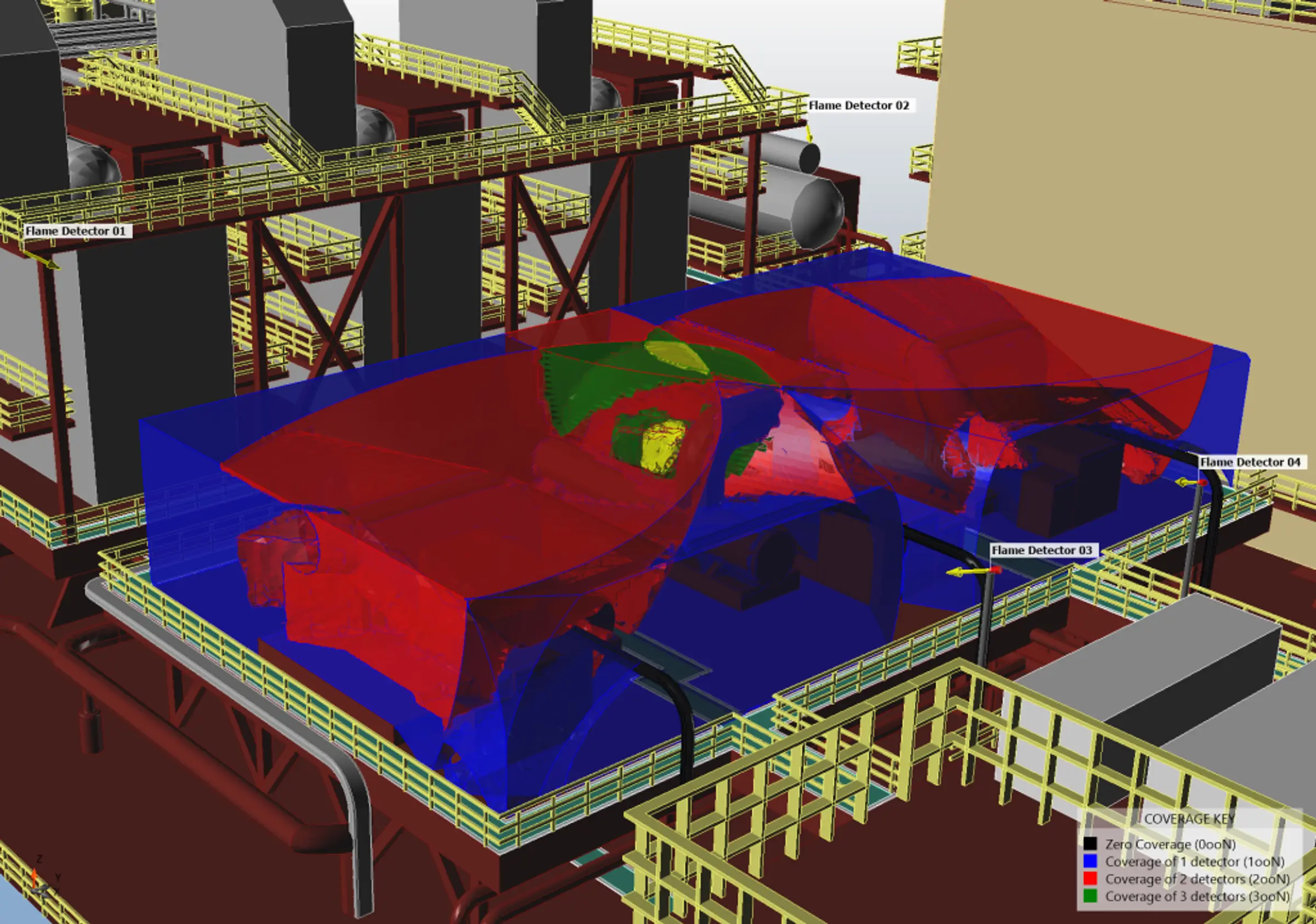
Volumetric or geographic mapping is a performance-based method where the facility's three-dimensional space is divided into zones where coverage is required. Detectors are placed to maximise coverage of these spaces, with the goal of achieving target coverage metrics – typically expressed as a percentage of volume covered within a specified time-to-detect.
The achieved coverage is quantified by the fraction of the unobstructed detection zone covered by at least the required number of detectors (e.g. two out of N, denoted 2ooN).
In some circumstances it can be convenient and appropriate to specify a uniform grid of detectors, but volumetric mapping does not require uniform spacing or symmetrical grid layouts. Modern volumetric tools incorporate ray-tracing algorithms that can account for obstacles, congestion, and detector-specific field-of-view characteristics. This allows for optimised detector placement even in complex geometries.
Advantages:
- Relatively quick to implement using standardised software tools.
- Provides measurable coverage performance against defined detection targets.
- Suitable for validating minimum detection performance.
- Capable of accounting for obstacles and detector field-of-view.
Limitations:
- Does not distinguish between high- and low-risk areas.
- Coverage objectives may be met while omitting critical detection zones.
- Can over-specify detectors unless constrained by consequence or scenario relevance.
Applicable Detector Technologies:
- Flame Detectors: UV, IR, and UV/IR detectors benefit from defined field-of-view modelling.
- Flammable/toxic Gas Detectors: Point and open-path detectors can be evaluated for localised gas presence.
- Acoustic Detectors: Can be evaluated volumetrically in high-pressure gas release environments; however, their effectiveness is often scenario-specific.
Scenario-Based Mapping
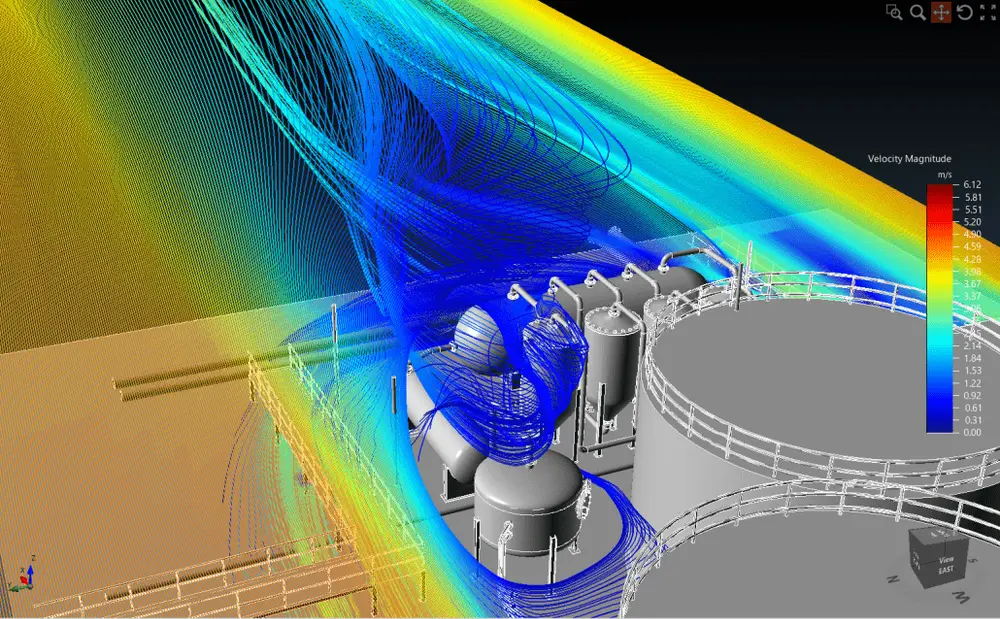
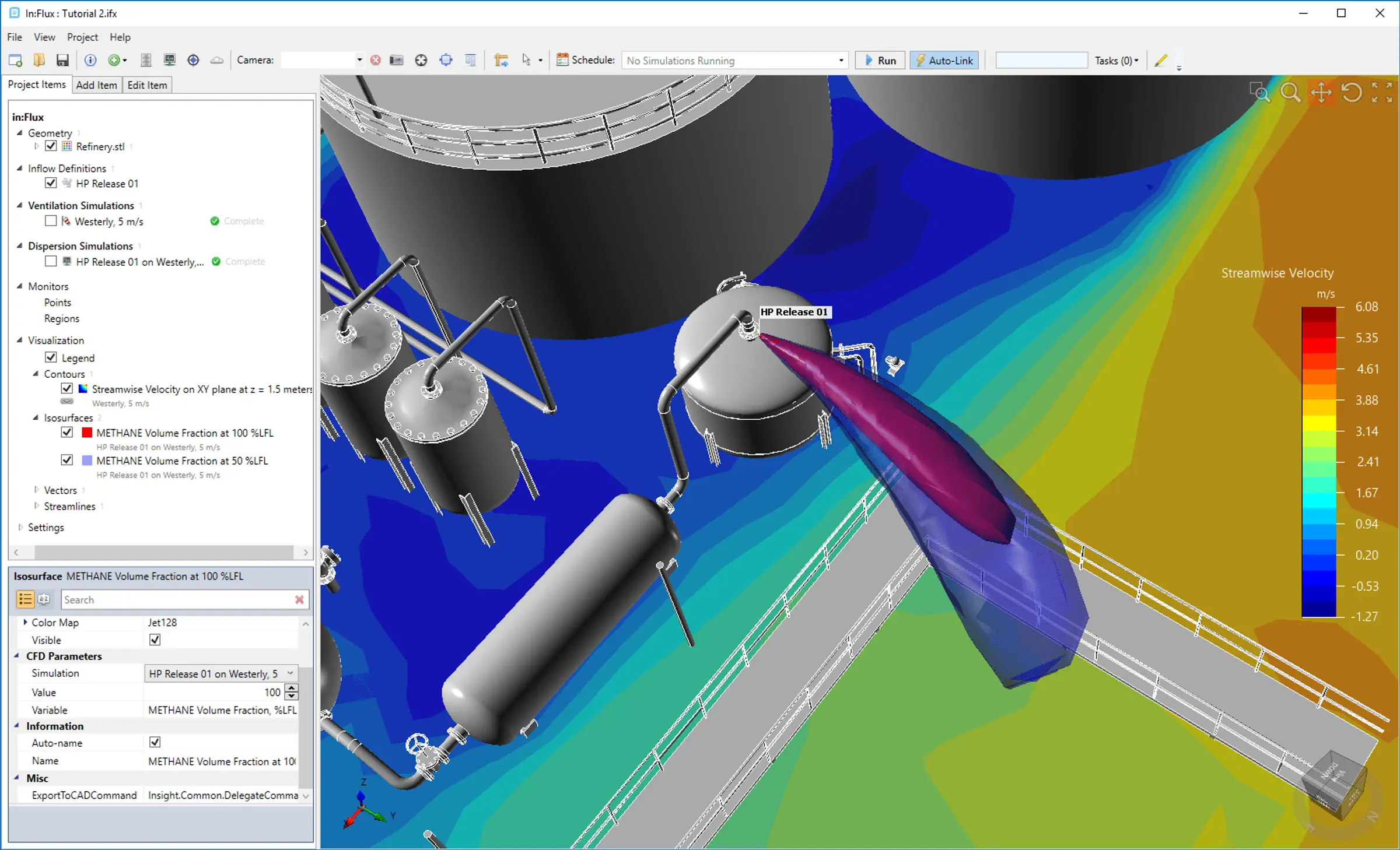
Scenario-based mapping focuses on identifying credible hazardous events and modelling the behaviour of fire and gas releases in space and time. Computational Fluid Dynamics (CFD) or other dispersion and fire modelling tools are used to simulate representative scenarios. Detector placement is then optimised to ensure effective detection of these scenarios.
The achieved coverage is quantified by the fraction of the scenarios modelled that are detected by at least the required number of detectors (e.g. 2ooN).
Advantages:
- Realistic modelling of the evolution of leaks and fires based on actual process conditions.
- Allows targeted optimisation, avoiding over-coverage in unimportant regions.
- Flexible in incorporating complex terrain, obstructions, wind conditions, and ventilation patterns.
Limitations:
- Requires reliable source term data and boundary conditions.
- Time-intensive due to simulation setup and review cycles.
- May miss detection opportunities in non-simulated scenarios unless a comprehensive scenario set is developed.
Applicable Detector Technologies:
- Flame Detectors: Strategically placed based on expected flame spread and visibility.
- Gas Cloud Detectors: Open-path detectors placed where plumes or jets pass; point detectors placed where gas pockets accumulate.
- Acoustic Detectors: Effective for high-pressure leaks only when directional sound propagation is known.
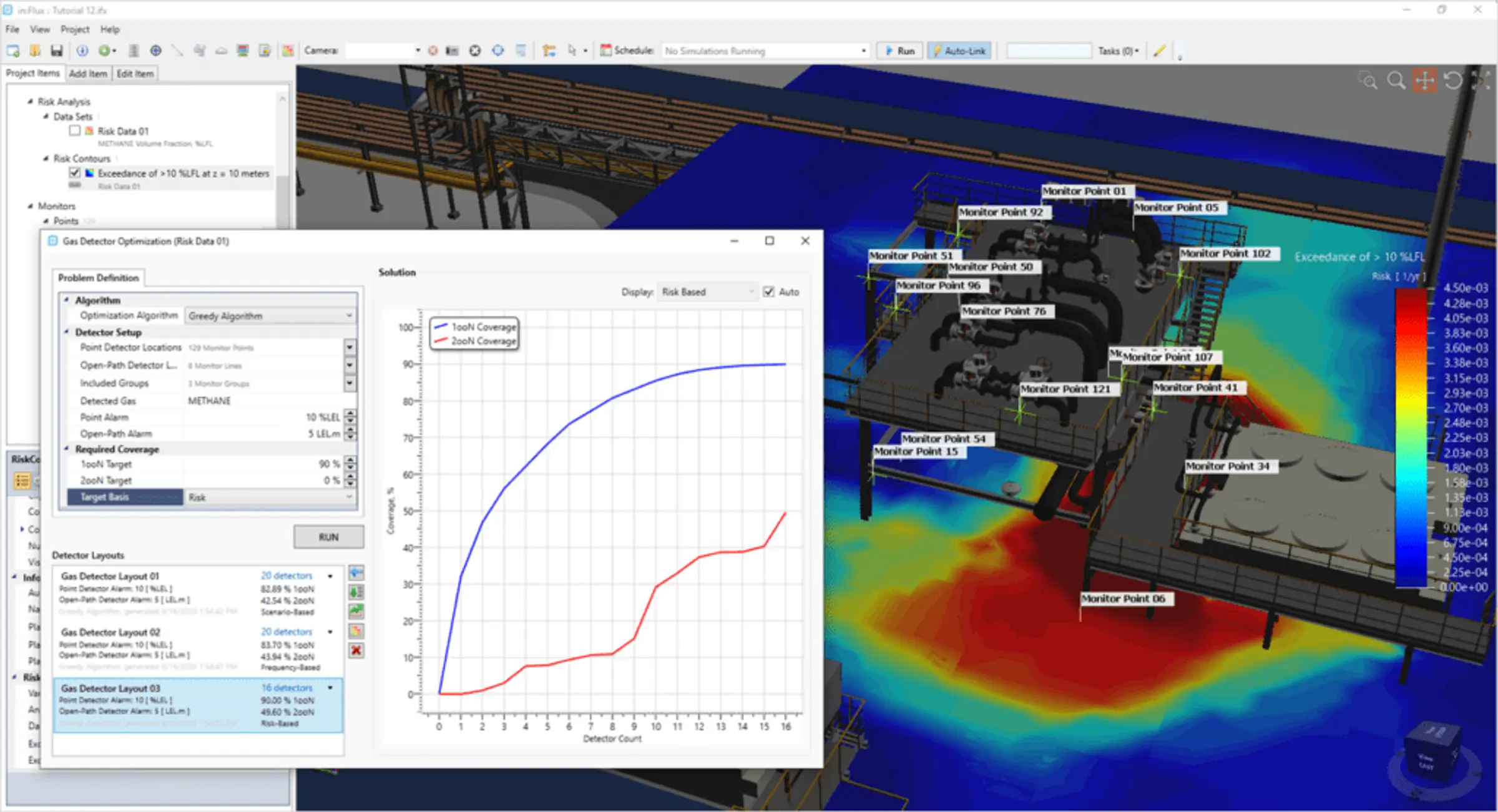
Risk-Based Mapping
Risk-based mapping extends scenario-based techniques by integrating frequency data from Quantitative Risk Assessments (QRAs). It prioritises detector placement in areas where risk reduction benefit is greatest. This method aligns fire and gas detection with broader process safety risk management strategies.
Advantages:
- Strong alignment with ALARP principles and safety case justification.
- Enables prioritised deployment of high-specification detectors.
- Allows cost-benefit optimisation through quantified performance improvement.
Limitations:
- Requires detailed QRA data.
- The most sophisticated software and domain expertise are essential.
- Detection performance may be scenario-dependent.
Applicable Detector Technologies:
- Flame Detectors: Allocated where ignition consequences are high and likelihood significant.
- Gas Cloud Detectors: Deployed in zones with highest cumulative risk exposure.
- Acoustic Detectors: Used where high-consequence gas releases occur frequently enough to justify them.
Comparative Summary
| Method | Complexity | Data Requirements | Customisation | Optimised For |
|---|---|---|---|---|
| Volumetric | Moderate | Moderate | Moderate | Spatial coverage of localised releases and accumulations |
| Scenario-Based | High | High | High | Analysis of comprehensive sets of hazard scenarios |
| Risk-Based | Very High | Very High | Very High | Risk-based quantified risk reduction |
Recommendations
-
Volumetric Mapping remains a valuable tool, especially when combined with obstruction modelling and ray-tracing. It is best applied where prescriptive targets are set and where coverage areas are easily defined, or where initial coverage benchmarking is required.
-
Scenario-Based Mapping is recommended where a comprehensive set of credible, dominant scenarios are identifiable, such as well-defined process hazards from specific leak points. It can be used to confirm the effectiveness of a detector layout determined from volumetric analysis.
-
Risk-Based Mapping is the most strategic method and is highly recommended for major hazard installations where full QRA integration is possible. It is the most effective tool for demonstrating that the risk of non-detection is ALARP.
In practice, hybrid approaches yield the most resilient designs – balancing detection reliability, installation cost, and risk reduction benefit.